Development of Self-Evolutionary Embodied AGI Platform through Real-World Experience
Research on developing artificial general intelligence through embodied interaction with the physical world.
Project Period
2025.04 - 2029.12
Participating Organizations
KIST, Yonsei Univ, KRM
Project Budget
KRW
Managing Agency
IITP
Research Objectives
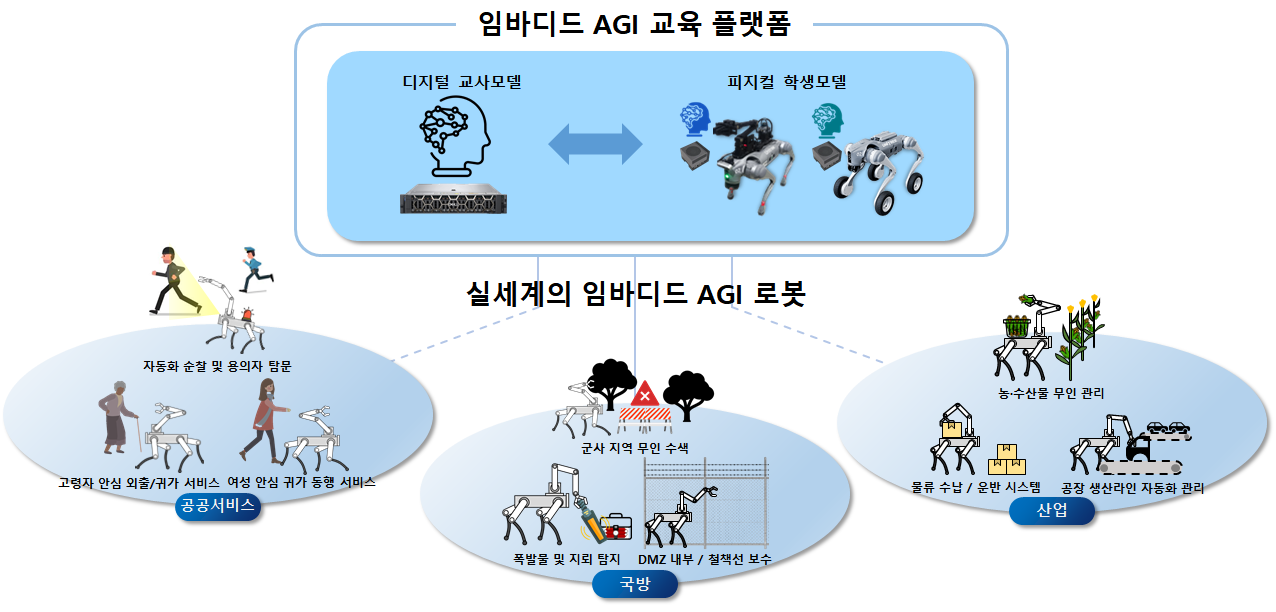
This research aims to enhance artificial intelligence's generalization capabilities through interaction with the physical world. We seek to build theoretical foundations and conduct experimental validation using robots.
Key Research Areas
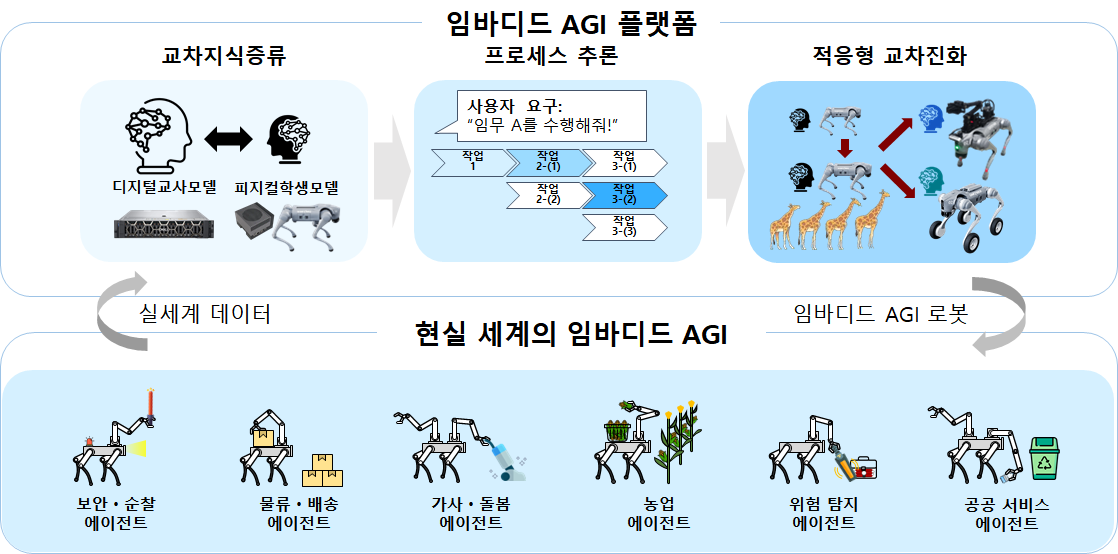
1. Learning through physical interaction 2. Building theoretical foundations for generalized intelligence 3. Developing robotic systems for experimental validation 4. Research on human-robot interaction
Expected Impact
Through this research, we expect to enhance AI's generalization capabilities and validate its applicability in the real physical world. Additionally, we aim to present a new paradigm for human-robot interaction.